Current Research Interests
- - Spatial-Aware Intelligence
- - Embodied AI
I am a researcher passionate about advancing spatial-aware intelligence—enabling machines to perceive, understand, and interact intelligently with the 3D world. As a Postdoctoral Researcher in Computer Science and Engineering at the University of Michigan, Ann Arbor, I work with Prof. Stella X. Yu on combining 3D perception, generative models, and robotics to push the frontier of intelligent systems.
I earned my Ph.D. from the Multimedia Laboratory at the Chinese University of Hong Kong, advised by Prof. Hongsheng Li and Prof. Xiaogang Wang. Prior to that, I conducted research at the State Key Lab of CAD&CG, Zhejiang University, under the guidance of Prof. Guofeng Zhang and Prof. Hujun Bao.
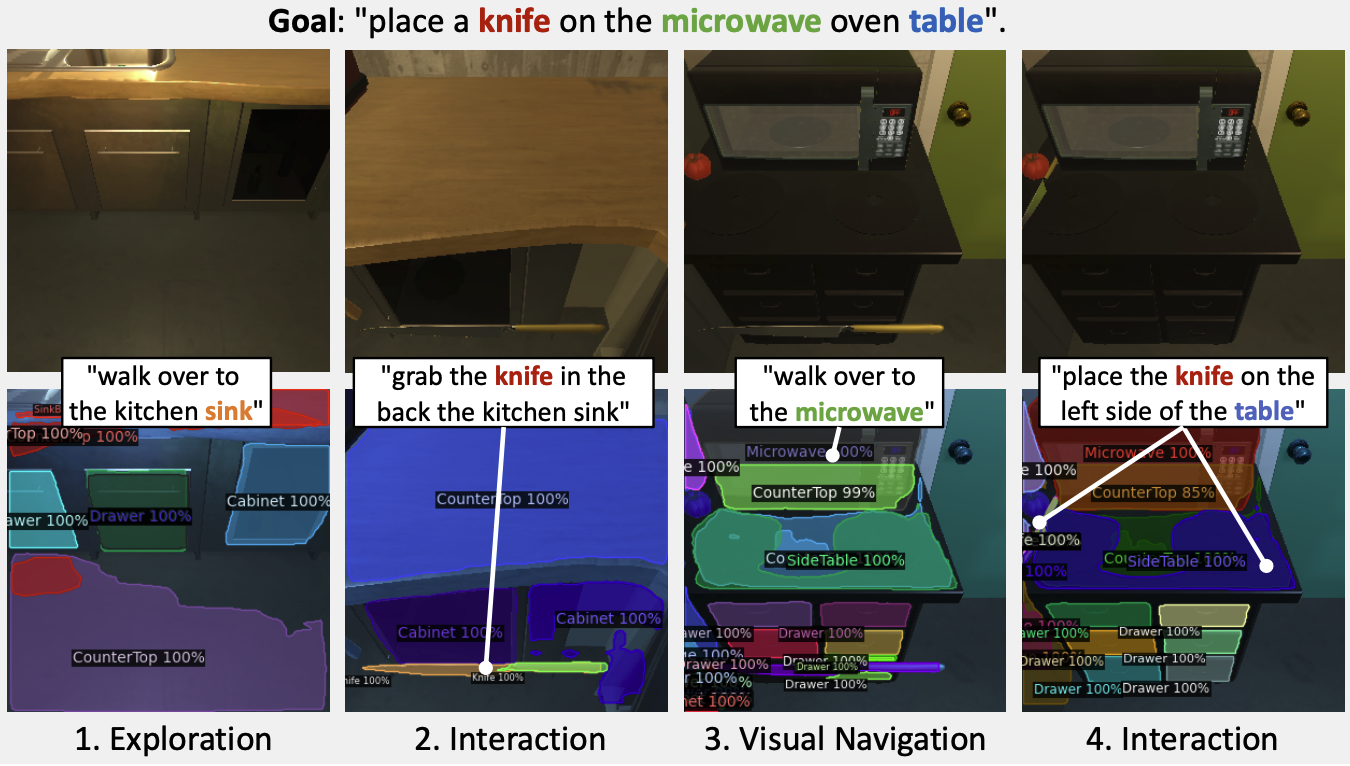
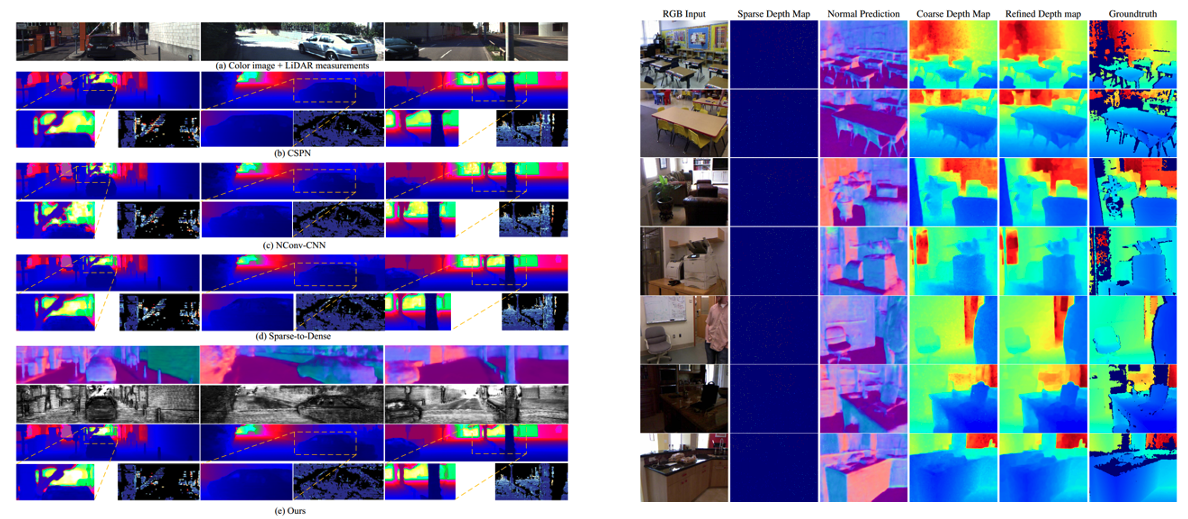
My research spans 3D scene understanding, embodied AI, and generative models. I have developed novel methods for 3D object detection, semantic segmentation, and scene reconstruction from point clouds and multi-view images. I have also explored embodied AI tasks such as visual navigation and instruction following in complex 3D environments. Additionally, I have worked on generative models for 3D content creation and scene synthesis. Dr. Xu's long-term vision is to push forward spatial-aware intelligence, bridging 3D scene understanding with intelligent decision-making to create more capable and context-aware machines.